About Me

I am a researcher on the robotics team at Bosch Corporate Research, focusing on applied research for robotic assembly. I hold an M.Sc. in Robotics from Tel Aviv University's lab, where I gained hands-on experience in robotics, deep learning, imitation learning and computer vision. My passion lies at the intersection of AI and robotics—specifically, the seamless integration of smart robots into real-world applications for human benefit. I am a highly motivated and committed team player who thrives on helping my colleagues improve and succeed together.
Interests
Robotics
Deep Learning
Computer Vision
Perception
Basketball
3D Printing & DIY
Beach
Traveling
Experience
Robotics & AI Researcher
2024 - Present
Bosch Corporate Research
Developing AI-driven solutions for UR5E-based assembly automation in Bosch plants. Researching robotic manipulation and perception at BCAI-Haifa.
Robotics Researcher
2022 - 2024
Robotics Lab of Tel Aviv University
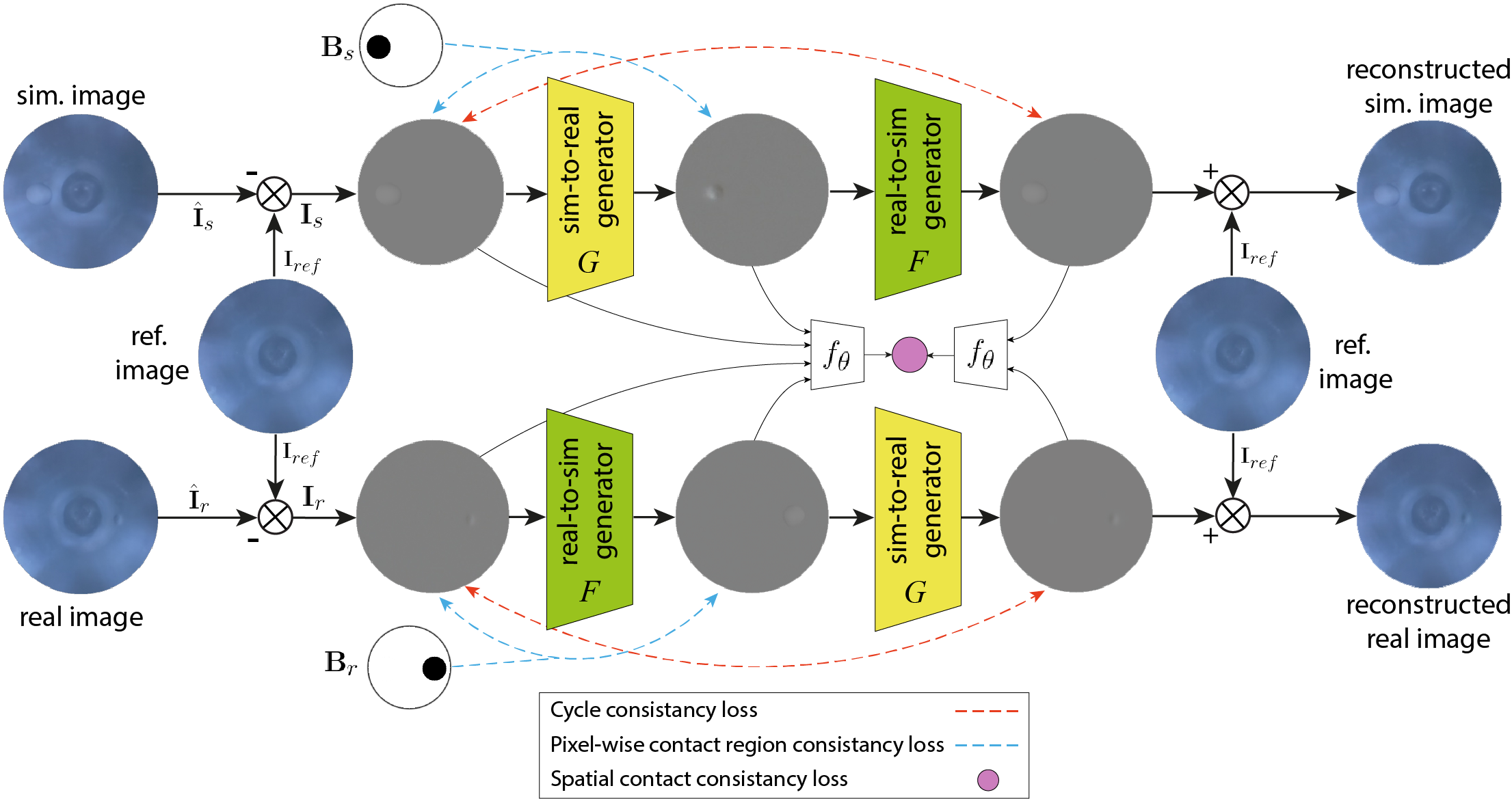
Focus on visual imitation learning for robot navigation, human-exoskeleton interaction using stereo vision, and sim2real tactile perception.

Course Instructor, Computational Intelligence
2022 - 2024
Tel Aviv University
Designed and delivered hands-on python exercises covering genetic algorithms, fuzzy logic, and an introduction to ML & DL.
Integration System Engineer
2020 - 2022
Indoor Robotics
Built, operated, and designed tests for autonomous drones and docking systems.
Education
M.Sc in Robotics, Mechanical Engineering
2022 - 2024
Tel Aviv University
GPA 95/100
B.Sc, Mechanical Engineering
2018 - 2022
Tel Aviv University
GPA 89/100
My Research
Embodiment-Agnostic Navigation Policy Trained with Visual Demonstrations
Nimrod Curtis*, Osher Azulay*, and Avishai Sintov.
preprint
We proposed ViDEN, a framework that uses visual demonstrations and depth-based observations to train embodiment-agnostic navigation policies.
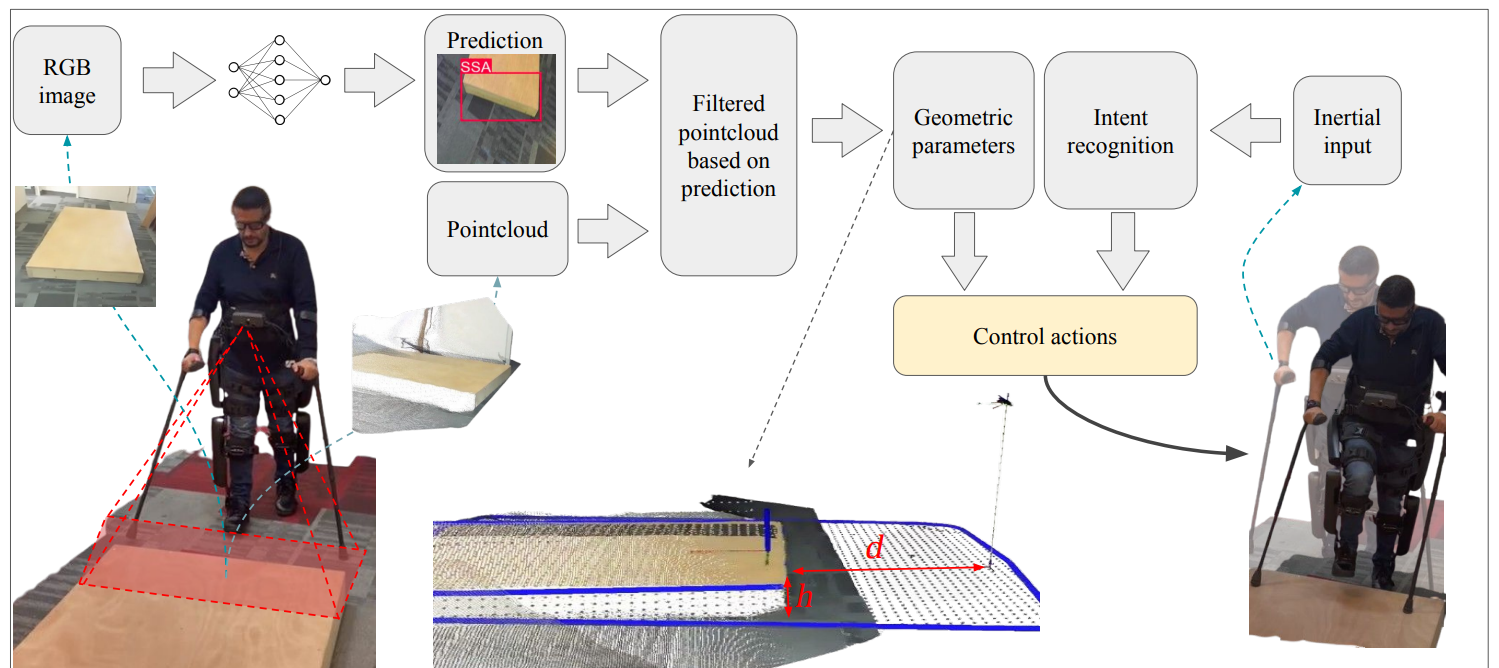
A Framework for Safe and Natural Mobility in Lower Limb Exoskeletons
Nimrod Curtis, Anis Shakour, David Hexner, Yehuda Bitton, and Avishai Sintov
Workshop on emerging technologies in smart exoskeletons systems, ICRA, 2024
Developing a context-aware control framework for exoskeletons that uses wearable sensors and vision to detect user intent and terrain, enabling safe and intuitive mobility.
My Projects
Lerobot SO101 + ROS2 + Isaacsim/lab
In Progress ...
Developing a ROS 2 package for the Lerobot SO101 arm, enabling integration with Isaac Sim/Lab environments and training policies through co-training frameworks from both simulation and real-world data. View Code →
ShopiPal: An Autonomous Robotic Cart
B.Sc Final Project
ShopiPal aims to assist the manual picking process in supermarkets and warehouses, enhancing convenience and efficiency.
View Code →
Mini-Projects on SLAM
Coursework
A collection of various SLAM techniques and implementations using the KITTI dataset to enhance localization and mapping.
View Project →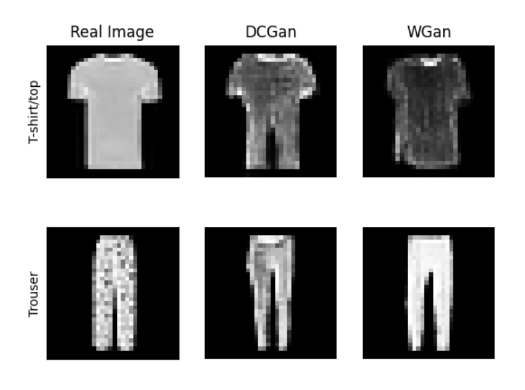
Deep Learning Projects Collection
Coursework
This collection features various deep learning projects, exploring different neural network architectures and their applications.
View Project →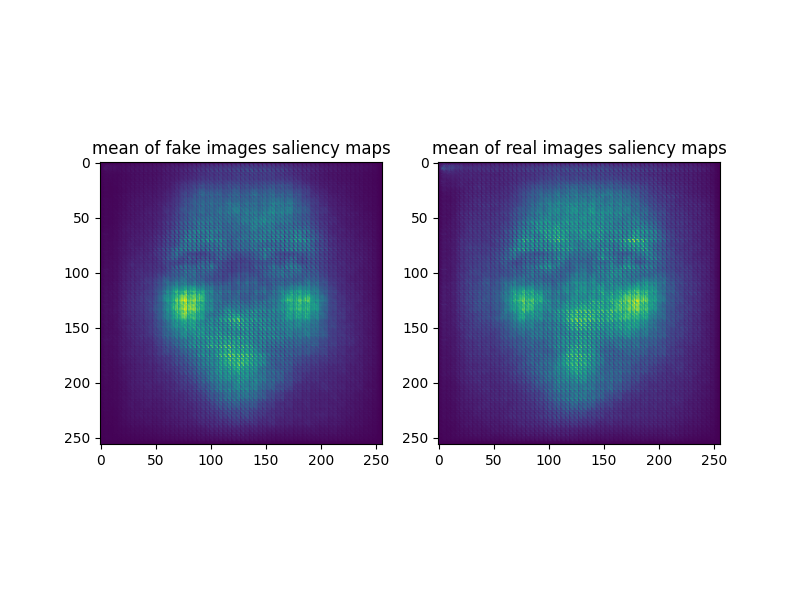
Computer Vision Mini Projects
Coursework
A collection of computer vision projects such as image stitching, real/fake image detection, and more.
View Project →Awards & Honors
Dean's List, M.Sc
Tel Aviv University, 2025
Faculty Scholarship for M.Sc Excellence
Tel Aviv University, 2024
IEEE RAS Travel Award
Tel Aviv University, 2024
Outstanding Final Project
Mechanical Engineering Faculty, TAU, 2022